| Home RC Modellflug Veröffentlichungen von mir FMT 12/2008, Robin Dauphin DR400, Teil 1 |
RC Modellflug |
| Home RC Modellflug Veröffentlichungen von mir FMT 12/2008, Robin Dauphin DR400, Teil 1 |
RC Modellflug |
|
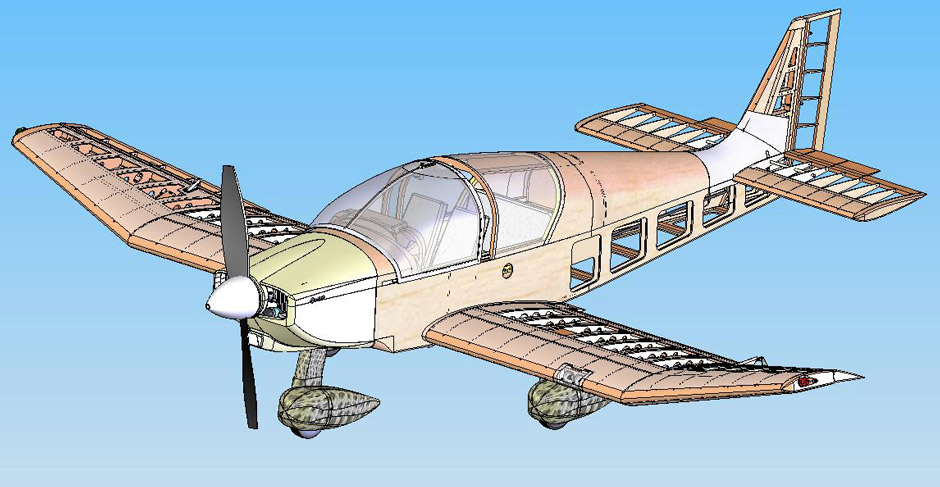
Artikel: Robin Dauphin DR400, Teil 1 >> weiter zu Teil 2 Ein Grossmodell der Superlative |
|
|
|
|
|
Mit dem Vorbild für dieses Modells, der HB-KEB, habe ich im
Jahr 2000 einen guten Teil meiner Flugausbildung zum Privatpiloten absolvieren dürfen.
Ich flog sie immer sehr gerne. Sie war damals die „stärkste“ der drei Robin
Schulmaschinen die in Lommis (LSZT), Thurgau/Schweiz, für die Schulung
eingesetzt werden. Zwar war bei allen der gleiche Motor eingebaut, aber die
Schalldämpferanlagen waren unterschiedlich. Die HB-KEB konnte deutlich mehr
Leistung umsetzten.
|
|
|
Da ich den Modellflug trotz Pilotenschein nicht aufgab, spukte
bald der Gedanke im Kopf herum:„ Ja, eine Robin von Lommis als Modell, das
wäre doch etwas." Als dann bei windigem Wetter meine damalige
Schleppmaschine durch eine starke Bö bei der Landung zerstört wurde, war sogar
ein potenzieller Antrieb in Form eines 3W48B-Boxer-Benzinmotors verfügbar.
Damit war der Virus latent vorhanden und brach im Frühling 2005 aus, als ich
erfuhr, dass die HB-KEB aufgrund einer großen anstehenden Revision gegen eine
baugleiche fabrikneue Robin in Zahlung gegeben werden sollte. Es war reiner
Zufall, dass ich noch gut 40 Bilder von der HB-KEB machen konnte, bevor sie das
letzte Mal in Lommis startete. Heute (2007/08) wird die HB-KEB von der Groupe de
Vol ä Moteur in Sion (Schweiz) betrieben.
|
|
|
Die Eckdaten
Für den Maßstab gab es zwei Eckpfeiler, die berücksichtigt werden mussten: einmal der Motor mit 48 cm3 Hubraum und dann noch mein Auto, in welches das Modell am Ende passen sollte. Das angepeilte Fluggewicht setzte ich damals auf rund 12,5 kg an, die Spannweite mit 2,3 bis 2,5 m. Dann ging es ans Messen meines Kombi-Pkws. Schnell wurde klar, dass die Rumpflänge der limitierende Faktor sein würde. Ein rund 2 m langer Rumpf war das Maximum, das gerade noch hineinging, sofern das Höhenleitwerk demontierbar ist. Das ergab einen Maßstab um die 1:3,5 - aufgerundet auf 1:3,6 kommt man auf eine „runde" Spannweite von 2,4 m bei etwas mehr als 2 m Rumpflänge. Das müsste also zu schaffen sein. Der Motor sollte das auch problemlos bewältigen, schließlich ist keine Schleppmaschine geplant, sondern ein Modell, das in Richtung Semi- Scale geht. Als Flügelprofil sollte ein NACA 2415 zum Einsatz kommen, mit dem ich bei kleineren und größeren Motorflugmodellen schon sehr gute Erfahrungen gemacht hatte. Damit lagen die wichtigsten Parameter fest, jetzt müsste man nur noch wissen, wie groß die Robin genau ist. Die verfügbaren Dreiseitenansichten im Internet oder die Skizzen des originalen AFM (Flugzeug- Betriebsanleitungen") einer Robin halfen hier nicht viel weiter. Sie waren aber ausrechend für eine erste 3D-Studie.
|
|
|
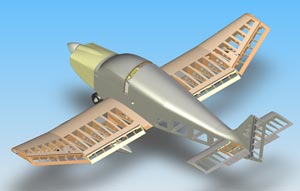
Konstruktion in einem 3D-CAD-System
Beruflich bedingt bin ich es gewohnt, mit professionellen 3D-CAD-Systemen zu arbeiten. So habe ich mir privat eine Lizenz von Solidworks gekauft, demselben Programm, mit dem ich damals auch im Beruf täglich arbeitete. Dieses zugegebenermaßen sehr teure Programm ist jedem günstigeren Produkt der unteren Preisklasse (bis ca. 600 Euro) weit überlegen. Das ab der FMT- Ausgabe 11/2007 vorgestellte MegaCAD 2007 ist ein ganz gutes 3D-CADProgramm für einfache einzelne Teile, aber für die Konstruktion eines kompletten (!) Modells bei Weitem nicht ausreichend. Dazu braucht man ein professionelles 3D-CAD-System, da gerade bei einem ferngesteuerten Flugmodell mit etwas eingebauter Technik hohe Ansprüche an die Teilemodellierung und den Baugruppenmodus gestellt werden. Bedingt durch den komplexen Aufbau sind solche Programme nicht gerade einfach zu erlernen. Bis man ein System wirklich beherrscht, sind mehrwöchige Kurse oder intensives Selbststudium und mindestens ein halbes Jahr tägliche Praxis notwendig, dann sollte man die Grundlagen beherrschen. Auch nach Jahren wird man noch längst nicht alle Funktionen kennen und muss immer wieder lernen und probieren, um zum Ziel zu kommen. |
|
|
|
|
Mit der Konstruktion habe ich begonnen, indem ich im Sommer 2005
ein erstes grobes 3D-Modell erstellte. Dieses Modell diente als Basis für eine
erste Messaktion an einer realen Robin Dauphin. Anfang September 2005 verbrachte
ich dann rund vier Stunden damit, die wichtigsten Maße der Originalmaschine mit
Senkblei, Bandmaß, Klappmaßstab und Holzleisten zu ermitteln. Mit diesen
Ergebnissen entstand in den folgenden Wochen die eigentliche Konstruktion des
Modells. Ich habe bis heute mehr als 700 Stunden am CAD verbracht. Dank dieser
detaillierten Konstruktion war ich in der Lage, die Gewichte der einzelnen
Komponenten genau abzuschätzen. Auch der Schwerpunkt konnte von Anfang an
berücksichtigt werden. So muss ich kein Gramm Blei verwenden, um den
Schwerpunkt im gewünschten Bereich zu halten. Schon in der Konstruktionsphase
konnten viele auftretende Probleme erkannt, analysiert und Lösungen ausprobiert
werden. Die Arbeit hat sich gelohnt: Der Bau des Modells verlief weitgehend
problemlos.
|
|
|
Technische Daten:
Massstab: 1:3.6
|
 Die Flügelinnenteile werden mit dem Flächensteckungsrohr ausgerichetet |
|
Klassische Ausführung
Das Modell ist wie das Original weitgehend aus Holz gebaut. Der Flügel ist ein klassischer Rippenflügel. Erwähnenswert ist hier die kastenförmige Hauptholmkonstruktion, die im durchgehenden, geraden Innenflügel mit vier 5x10-mm-Kiefernleisten aufgebaut ist. Rundherum verkastet und beplankt gibt das ein sehr stabiles Strukturelement. Im Inneren verläuft das Flächensteckungsrohr mit einem Durchmesser von 40 mm. Dieses Alu-Rohr ist so lang, dass es auch noch durch die Fahrwerksaufnahme geht. So sollten die Landestöße gut in die Konstruktion eingeleitet werden können. |
 Der rechte Knickflügel wird mit dem Innenflügel verleimt |
| Die Verbindung der charakteristischen Knickflügel mit dem geraden Innenstück erfolgt mit Hilfe von Flächenverbindern, die aus 5-mm-Flugzeugsperrholz zugesägt wurden. Jeweils zwei Stück sind miteinander verklebt (Kiefernleisten sind 10 mm breit). Mit den beidseitigen Ausnehmungen in den Verbindern sollen die Kräfte gleichmäßig in die Konstruktion eingeleitet werden. So kommt es nicht zu extremen Querschnittvergrößerungen, an denen Brüche bei der Überlastung von Strukturen bevorzugt ihren Anfang haben. | |
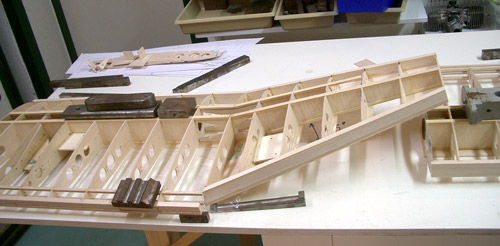
 Auf dem Rücken liegend entsteht langsam der Rumpf |
|
| Holz ist der Grund für das wesentliche Erkennungselement einer Robin DR400 - die Knickflügel. Das Hauptfahrwerk wird beidseits vom Rumpf im Flügel verankert. Mit dem geraden Innenflügel ist es möglich, einen geraden, durchgehenden Hauptholm zu bauen, der die Landestöße vom Fahrwerk gut in den Rumpf einleiten kann, da der Holm bis zu den Flügelknicken gerade durchläuft. Um trotzdem die Längsstabilisation durch V-Form zu erzielen, wurde der Flügel außen mit den charakteristischen Knickflügeln ausgestattet. Die beiden inneren, geraden Flächenstücke wurden schon sehr früh mit dem Flächensteckungsrohr genau gegeneinander ausgerichtet. Die 5 mm dicke beidseitige Holmverkastung aus Balsaholz ergibt zusammen mit der 2-mm-Balsabeplankung einen sehr stabilen und trotzdem leichten Flügel. Der Bereich für die Fahrwerksaufnahme ist mit 5-mm- Flugzeugsperrholz ausgekleidet und steht in direktem Kontakt mit dem Hauptholmkasten und dem Rohr für die Flächensteckung. | |
 Das Seitenruder wird über Seile angelenkt |
|
|
Das Leitwerk ist konventionell ausgeführt. Das Seitenruder wird
über Seile angelenkt. Die kunststoffummantelten Drahtlitzen verlaufen in
Alu-Rohren. Ein kräftiges Servo ist vom direkten Zug durch eine kugelgelagerte
Seilscheibe entkoppelt. Das Höhenruder ist als Pendelruder ausgeführt, das
über einen stabilen Alu-Hebel bewegt wird. Dank der dicken kugelgelagerten
Welle und des starken 16-kg-Servos ergibt das eine stabile und spielfreie
Anlenkung.
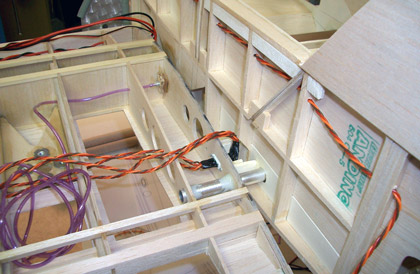
Rumpf mit Kabinenhaube Der Rumpf ist ein Gerüst aus Balsaleisten, das innen und außen mit 2-mm-Balsa beplankt ist. Durch diese Gerüstbauweise erzielt man einen leichten, aber doch sehr verwindungssteifen Rumpf. Sehr hilfreich waren dabei die selbst gebauten Winkel aus Kiefernleisten, bei denen ich als Standhilfe unten ein zylindrisches Abfallstück aus Stahl einklebte. Die Winkel waren beim Ausrichten auf dem abgedeckten Plan unverzichtbar. Dieser Aufbau hat noch den weiteren Vorteil, dass ich
innerhalb des Gerüstes die meisten Kabel sauber verlegen konnte. Und da kam
schon einiges zusammen: Stromversorgung, Servokabel, Kabel für Beleuchtung, die
Schläuche für das pneumatisch gebremste Hauptfahrwerk. |
|
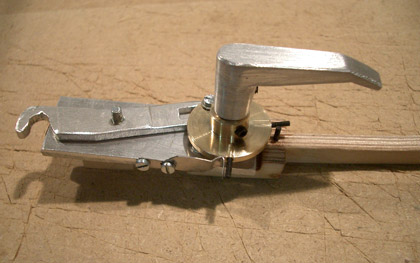
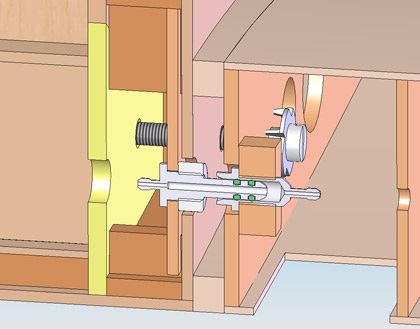 Planung der pneumatischen Kupplung |
|
| Für den trennbaren pneumatischen Anschluss der Radbremsen habe ich einfache Kupplungsstücke gedreht. Gedichtet wird mit jeweils zwei kleinen O-Ringen. Die Kabinenhaube war eine echte Herausforderung, denn sie sollte wie beim Original ausgeführt werden, d.h., der vordere Teil sollte ebenfalls zu öffnen sein. Ausgangspunkt war hier die auch als Ersatzteil erhältliche Kabinenhaube der großen Airworld- Robin im Maßstab 3:1. Nachdem die Führung im Rumpf (Aluminium- U-Profil) endlich fertig war, machte ich mich an eines der Highlights, den voll funktionsfähigen Kabinenhaubenverschluss. Der erste Entwurf und seine Umsetzung war ein Fehlschlag: viel zu kompliziert, es klemmte an allen Ecken und Enden. | |
 Aufhängung des 3W- Boxermotors |
|
| Nach dem ersten Frust kam mir dann die Idee, wie man das viel einfacher machen kann. Der eigentliche Riegel wird über einen Mitnehmerzapfen auf der Verschlussachse hin und her geschwenkt. Eine seitliche Blattfeder arretiert das Ganze in einer Kerbe, damit sich der Verschluss nicht öffnen kann. Der Motor, ein 3W48B-Boxer, ist mit einer GFK Zwischenplatte steif, aber trotzdem elastisch entkoppelt montiert (sechs Schwinggummis mit 20 mm Durchmesser). Mit den vier vorderen Distanzhülsen wurde der Seitenzug und Sturz eingestellt (unterschiedliche Längen und entsprechend schräg geschliffene Auflageflächen). Dank der CAD-Planung kommt die Welle mittig aus der Motorhaube heraus. Ende 2006 war der Rohbau abgeschlossen. Nun ging es an die technischen Einbauten und die GFK-Teile. Davon berichte ich dann im zweiten Teil dieses Beitrags. | |
 Das Original in Lommis (LSZT)
|
|
| Weiter zum Teil 2 | |
|
Als zusätzliche Unterstützung für diejenigen die den Bauplan erworben haben und eine eigene CNC- Fräsanlage besitzen, habe ich die wichtigsten Rippen- und Spanten in einer separaten Zeichnung zusammengefasst. Es handelt sich dabei um die Teileansichten, direkt aus dem CAD- System. Darum sind manche Ansichten eventuell noch nachzuarbeiten, da die Verwendung für diesen Fall, während der Konstruktion, nicht vorgesehen war. Das Zuordnen der Teile sollte anhand des Bauplanes keine zu grossen Probleme bereiten. Rippen,
Spannten der Robin DR400, PDF (192 KB)
|
Der gesamte Bau wurde dokumentiert und mit einem erfolgreichen Jungfernflug am 7.5.2008, in voll ausgerüstetem Zustand abgeschlossen...
3D-Modell des Rohbaus (5.9 MB) Es ist eine "exe" Datei die neben den 3D-Modelldaten auch das Viewer- Programm eDrawing enthält. Ohne Installation kann das 3D- Modell angeschaut werden (drehen, zoomen mit der mittleren Maustaste, oder über die Symbolschaltflächen).
Ergänzend ist hier der Transportwagen als 3D-CAD Modell zum downloaden: Transportwagen.step
(2060 KB)
|
| Letzte Aktualisierung: 17. Mai 2014 | |
| Copyright ©, Christian Forrer, alle Rechte vorbehalten | |