| Home RC Modellflug Veröffentlichungen von mir Slow Flyer aber draussen und "richtig" |
RC Modellflug |
| Home RC Modellflug Veröffentlichungen von mir Slow Flyer aber draussen und "richtig" |
RC Modellflug |
Slow Flyer, aber draussen und „richtig“…

Für die Piper Archer kann ein Bauplan herunter geladen werden (198 KB)
|
Die Vorgeschichte |
| Die hier gezeigten Antriebs- und Servokomponenten basieren auf den damaligen Möglichkeiten. Die Technik entwickelt sich aber immer weiter. Darum orientiert man sich bei einem Nachbau am besten an aktuellen ARF- oder Baukastenmodellen mit vergleichbaren Abmessungen, Flugleistungen und Abfluggewichten. Der Antrieb zum Beispiel kann mit neuen bürstenlosen Motoren (ohne Getriebe) leichter und trotzdem leistungsfähiger gewählt werden... |
Die VorgeschichteWie so viele andere Modellflugpiloten habe auch ich in den letzten Jahren (vor 2002) die, immer grösser werdende, Szene der Slow Flyer beobachtet. Im Herbst 1997 habe ich mit dem, ich möchte schon fast sagen klassischen, Slow Flyer BLERIOT von Ikarus erste Erfahrungen gesammelt. So richtig befriedigt hat mich dieses Modell aber nie und dass obwohl ich von „Flug- Modellbau Gross“ ein spezielles Antriebset für den BLERIOT besorgt habe, dass bessere Flugleistungen versprach. Das Flugbild liess sich kaum besser beschreiben, als mit den Worten; „es fliegt…“, das aber mehr wie ein motorisierter Hängegleiter, als wie ein normales Flugzeug. So dauerte es auch nicht allzu lange, bis dieses Modell auf dem Estrich abgestellt wurde. Bis zum Jahre 2001 war damit das Thema „Slow Flyer“ für mich abgehakt. Aber dann kam in der FMT 5/2001 der Beitrag von Zdenek Raska und seiner „P-92 ECHO“, einem Slow Flyer mit einem Meter Spannweite und nur gerade mal 230 bis 260 Gramm Abfluggewicht. Es handelt sich dabei um einen Hochdecker mit 3-Bein-Fahrwerk, der trotz dem geringen Fluggewicht wie ein Flugzeug gebaut war! Ich habe den Heftbauplan in den folgenden zwei, drei Monaten mehrmals studiert, und so langsam reifte in mir der Gedanke, ein sehr ähnliches Modell zu bauen.
|
||||
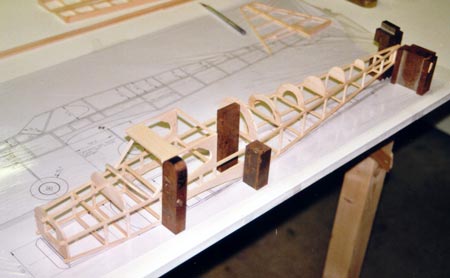
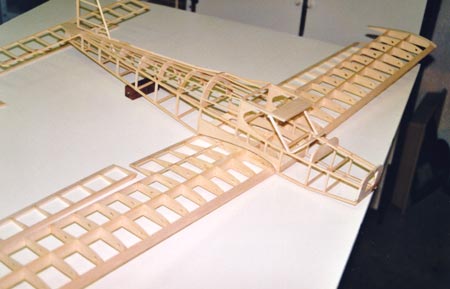
Der erste Versuch, die „CESSNA 150“Herr Raska hat mit seinem Modell den Leichtbau ziemlich stark ausgereizt. Viel leichter dürfte es kaum mehr gehen. Auch ist ein Modell mit so einem geringen Gewicht fast nur in der Halle, oder bei sehr wenig Wind im Freien, sicher zu fliegen. Wer aber hat eine grosse Turnhalle, einfach so in der Nähe und darf auch mit einem Modell darin fliegen? Ich sicher nicht. Demzufolge musste es ein Modell werden, das auch bei etwas stärkerem Wind nicht gleich in der Luft zerbricht und gut zu steuern ist. Das Resultat dieser Überlegungen ist die „CESSNA 150“. Der ganze Aufbau ist praktisch gleich wie bei der „P-92 ECHO“, das heisst Rumpfform, Flügel und Leitwerk sind gleich aufgebaut. Es wurden aber die folgenden strukturellen Änderungen vorgenommen: - Die Hauptholme des Flügels, Nasen- und Endleisten der Höhen- und Seitenleitwerksfläche sind mit 3x3 Millimeter Kiefernleisten ausgeführt und nicht aus Balsa wie bei Herrn Raska. - Der Flügel ist auf der ganzen Länge zwischen den Hauptholmen mit 3 Millimeter Balsa verkastet. - Auch die Rippen habe ich mit 2 Millimeter, deutlich dicker ausgeführt, als die bei der „P-92 ECHO“ mit 0.8 oder 1.5 Millimeter. - Nasen- und Endleisten von Höhen- und Seitenruder-Dämpfungsflächen sind mit 3x3 Millimeter Kiefernleisten (beim Echo in Balsa) Damit gewinnt das Modell so viel Stabilität, dass ein
Zerlegen in der Luft praktisch ausgeschlossen werden kann. Es kann an den Flügel-Enden
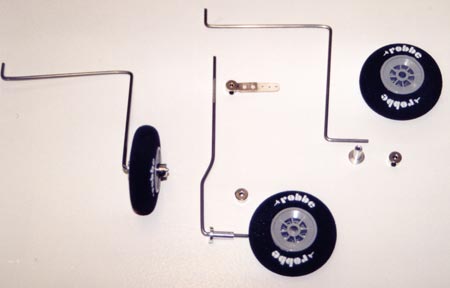
gehalten ohne Gefahr schnell nach oben und unten bewegt werden. - Der Flügel ist gerade, ohne V-Form, gebaut. - Die wichtigste Ergänzung sind zweifellos die angelenkten Querruder (sind im Plan der ECHO als Umrisse eingezeichnet), die bei der „P-92 ECHO“ aber nicht ausgeführt sind. - Auch das lenkbare Bugfahrwerk ist ein echter Gewinn für das Modell. All diese Änderungen habe ich mit einem anderen Namen für das Modell zum Ausdruck gebracht. Eine „CESSNA 150“ hat einen sehr ähnlichen Umriss, und das gerade Bugfahrwerk passt ganz gut. Da ich selbst diesen Typ „im Grossen fliege“, war dieser Name für mich sehr nahe liegend. Der Bau als solches lief, mit den erwähnten Änderungen,
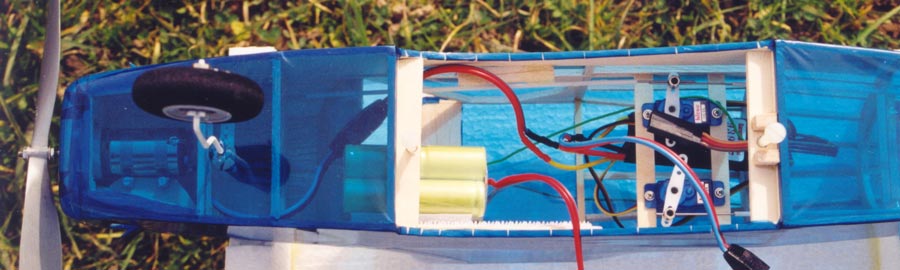
so ab, wie es im FMT 5/2001 beschrieben ist. Die Querruder werden über ein
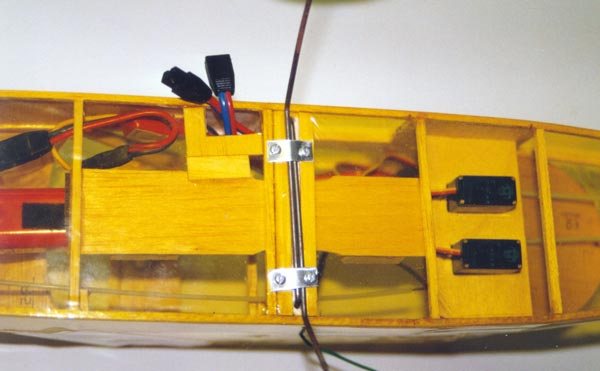
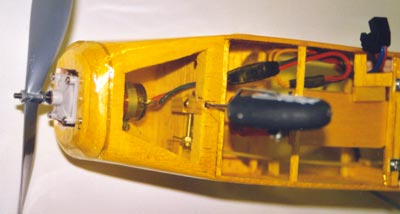
mittig eingebautes Servo bewegt. - Drei Servos (Hitec HS-55) bewegen die Ruder. - Ein Jeti „JES 05 micro“ Regler mit BEC ist für die Stromversorgung und Regelung verantwortlich. - Ein kleinerer, vom Gehäuse befreiter, Empfänger von Hitec (HFS-04MI mit 5 Kanälen) sorgt für den Funkkontakt. - Ein 8-Zellen, NiMh Akku, mit 600 mAh liefert den Strom -
Und ein Getriebemotor von Flug-Modellbau Gross die „Mücke“ (Kyosho
Motor Damit wird ein Abfluggewicht von 409 Gramm erreicht. Davon entfallen 77 Gramm auf den kompletten Flügel und 332 Gramm auf den Rumpf (mit der ganzen Ausrüstung). Bespannt habe ich alles mit transparenter Oracover Light Bügelfolie. Bei den ersten Flügen war noch ein 250 mAh NiCd Akku mit acht Zellen an Bord, damit waren es sogar nur 365 Gramm Fluggewicht!
|
||||
 |
|
|||
|
Schon die ersten Flüge zeigten, dass mehr als ausreichend
Leistung zur Verfügung steht. Mit dem lenkbaren Bugfahrwerk, sind Bodenstarts
auf einer Piste kein Problem und zusammen mit den Querrudern kann auch leichter
Seitenwind gut ausgesteuert werden. Das Flugverhalten der „Cessna 150“ ist
gleich, wie bei einem „normal grossen“ Modell, nur ist es natürlich
deutlich leichter. Die Geschwindigkeit ist höher als bei den heute verbreiteten
„Leichtschaum- Slow- Flyer“. Zum Landen kann auch sehr langsam eingeschwebt
werden. Ja, es ist sogar möglich, im Bodeneffekt, so in fünf bis zehn
Zentimeter Höhe, das Modell bis zur voll gezogenen Höhe ausschweben zu lassen,
genau so, wie ich es von „der richtigen“, grossen Cessna 150 her, auch
kenne! |
||||
|
|
||||
|
Mit den Querrudern ist eine sichere Kontrolle der Fluglage immer gewährleistet. Sie wirken direkt und präzise. Nur für eine normale Rolle, da wird es doch schon etwas mühsam, denn die Ruderflächen sind doch etwas knapp bemessen. Die gerissenen Rollen, kommen dafür aber blitzartig, und mit etwas Übung ist auch das Überdrehen des Modells zu verhindern (bei mir werden es immer wieder mal 1.5 Drehungen…). Der Verzicht auf die V-Form beim Flügel (Vereinfachung des Flügelbaus), hat nur insofern einen Einfluss, als das in den Kurven mit Seite und Quer gearbeitet werden muss, um eine saubere Linie zu fliegen. Looping und Turn sind ohne weiteres möglich. Ein Looping geht auch aus der Horizontalen heraus! Der Antrieb mit dem Getriebemotor Mücke (Flug-Modellbau Gross), der im BLERIOT nicht überzeugen konnte, zeigt in der CESSNA sein Potential. Trotzdem 6:1 Getriebe, ist es ein Antrieb, der „Fahrt im Modell verlangt“. Langsamere Modelle wie der BLERIOT sind eigentlich viel zu langsam, für die doch schon recht hoch drehende Einheit. In einem Konzept wie der „CESSNA 150“ mit ihren rund 400 Gramm Abfluggewicht ist dieser Antrieb aber genau richtig. Was ist nun aber zum Wind und zu der Flugdauer zu
vermelden? Nun, schon mit einem Was heisst nun aber „starker Wind“? Das ist natürlich sehr subjektiv. Ich bin auch schon an einem windigen Herbsttag geflogen, an dem ein Wollfaden von rund 50 Zentimeter Länge, waagerecht weggeblasen wird. Das Modell rollte sogar am Boden, geschoben durch den Wind, zurück. Es wehte also ein ganz kräftiges Lüftchen! Aber selbst unter solchen Bedingungen kann das Modell noch sicher geflogen werden. Das Problem ist die Landung, vor allem wenn sie auf der Piste sein sollte und nicht im „sicheren“ hohen Gras. „Böen“ können das Modell doch ziemlich stark herumwerfen. Aber mit den Querrudern ist es bisher immer gelungen, das Modell am Ende (einigermassen) sauber auf der Piste aufzusetzen. |
||||
 
 |
||||
|
Zusammenfassend kann ich also sagen, dass mit den oben erwähnten Modifikationen
aus der „P-92 ECHO“ von Zdenek Raska, ein vollwertiges 3-Achsgesteuertes
Elektromodell wird, das ohne Probleme im Freien geflogen werden kann (wenn nicht
gerade ein „Sturm“ ist). Wenn eine Piste vorhanden ist, sind Bodenstarts und
Landungen eine Augenweide, aber auch geworfene Starts und Landungen im hohen
Gras (Fahrwerk) sind möglich. In einem solchen Fall kann das Fahrwerk natürlich
auch weggelassen und so gleichzeitig einiges an Gewicht und Luftwiderstand
eingespart werden. Der Antrieb, der aus 8 Zellen gerade mal etwa 2.5 Ampere
bezieht, ist kraftvoll und mit NiMh- Akku auch ausdauernd. Ein gelungenes Modell
also, das ich in dieser Form jedem für den Nachbau empfehlen kann.
|
||||
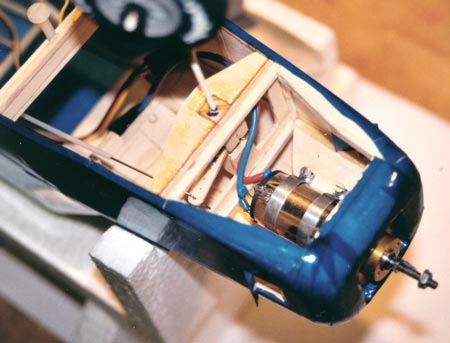
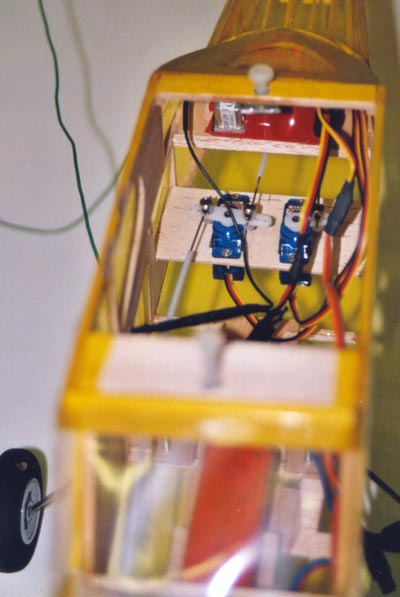
Die Kunstflugversion „PIPER ARCHER“Aber so ganz zufrieden war ich noch nicht. Sicher, die Flugeigenschaften sind gut, und ein langsamer Vorbeiflug des transparent bespannten Modells ist immer wieder eine Augenweide. Aber der letzte „Kick“ in „Sachen Kunstflug“, der fehlte noch. Das liegt nicht zuletzt in dem Umstand begründet, dass ein Hochdecker mit tief montiertem, schwerem, Akku, nicht gerade die besten Rolleigenschaften aufweisen kann. Und wenn dann noch die Querruder etwas zu klein geraten sind, werden die Grenzen des Möglichen doch bald erreicht. Was lag also näher, als einen Tiefdecker mit grösseren Querrudern zu bauen, um die Kunstflugeigenschaften zu verbessern? In den Flügeln wird das Hauptfahrwerk, in eingelassenen, 8x8 Millimeter Kiefernleisten montiert. Diese sind unter Verwendung von Balsaholz mit dem Hauptholm direkt verleimt. Es kommt (fast) der gleiche Antrieb wie in der CESSNA zur Anwendung. Fast deshalb, weil ich die Antriebsversion „Gold Mücke“ genommen habe, das ist der gleich Antrieb, aber mit Kugellager und Alu- Frontschild beim Getriebe (Flug-Modellbau Gross). Auch die Servos sind identisch. Als Empfänger kam hier aber einer von Simprop zur Anwendung, nämlich der „Micro- Scan 4+1“, der auch einen integrierten Motorsteller aufweist. Damit konnte ich gut 30 Gramm Gewicht einsparen, was aber aufgezehrt wurde durch die etwas grösseren Querruder und anderen „Kleinigkeiten“. Dieses Modell war das erste, das ich komplett mit einem 3D-CAD System (Solidworks) konstruiert habe. Obwohl ich auch im Geschäft mit diesem Programm arbeitete, war es eine Herausforderung ein solches Modell bis zu kleineren Details zu erstellen. Aber der Aufwand lohnte ich in jedem Fall da ich schon während der Konstruktion Probleme erkannte und beheben konnte die bei einer 2D-Konstruktion nur schwer erkennbar gewesen wären (wenn überhaupt, da man dort längst nicht alle Details berücksichtigt...) |
||||
|
||||
|
Bauplan zum Herunterladen (198 KB) |
Für alle die schon mal ein Modell aus Holz gebaut haben, dürfte es weiter kein Problem sein, dieses Modell mit der A4- Planskizze nachzubauen. Anhand der Masse kann der Plan mühelos auf die erforderliche Grösse „hoch kopiert“ werden. Die Bauweise erfordert weiter keine speziellen Kenntnisse. Holzleim ist eine gute Wahl, ich habe Sekundenkleber nur an wenigen Stellen gebraucht, vom Gewicht her macht das fast nichts aus. Auch das Einkaufen der Hölzer ist nicht so kritisch, da ja gar nicht so viel Holz benötigt wird. Natürlich sollte man nicht ausschliesslich nur „verholzte“, schwere Leisten aussuchen, sondern die leichtesten aussortieren. Aber auch ein paar der schwereren, festeren dürfen dabei sein, denn für die langen „Rumpfgurten“ sind diese ideal. Ansonsten gilt, einfach das jeweils leichteste aussuchen. Der Bau als solches sieht viel schwerer aus, als er wirklich ist. Der Rumpf ist nach drei Abenden schon im Rohbau fertig. Nach dem Erstellen der beiden „Seitenwände“ werden diese mit den Querleisten verbunden, der Rumpfrücken mit den Spannten aufgebaut und am Schluss die nötigen Verstärkungen für Motor, Fahrwerk und Servos eingebaut. Die Leitwerke werden einfach auf dem Plan zusammen geleimt. Die Rippen des Flügels sind mit zwei Sperrholz- „Musterrippen“ (1.5 mm) schnell erstellt. Nasen-, Endleisten und Hilfsholme usw. sind sicher nicht das Problem. Ich möchte mich hier nicht in einer „langweiligen“ Baubeschreibung verlieren, denn ich denke, es sollte keine grösseren Schwierigkeiten mit dem Bau geben.
|
|||
|
|
||||
|
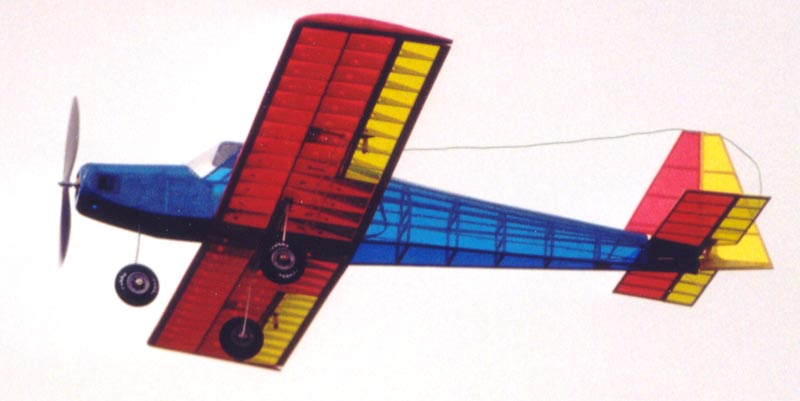
Meine „PIPER ARCHER“ hatte am Ende, mit einem 700 mAh NiMh Akku, ein Abfluggewicht von exakten 399 Gramm. Damit ist die Motorleistung ausreichend für die Standart- Kunstflugfiguren. Der Erstflug verlief absolut ohne Dramatik. Das Fugverhalten ist unkritisch. Schnell habe ich gemerkt, dass die Kunstflugeigenschaften so sind, wie ich mir das erhofft habe. Die Rolle kommt schnell und ohne allzu grosses „eiern“. Looping, Turn und Rückenflug sind möglich, auch wenn man „auf dem Rücken“ doch recht stark nachdrücken muss. Sogar die „vier- Zeiten- Rolle“ kann erstaunlich gut geflogen werden und die gerissene Rolle kommt sogar fast noch schneller als beim Vorgänger, der CESSNA.
Fliegen heisst bekanntlich Landen, und das ist, ich wiederhole mich hier, auch kein grösseres Problem; anfliegen mit etwas Schleppgas und dieses über der Piste langsam zurücknehmen, bis man den Bodeneffekt spürt (so etwa ab 20 cm Flughöhe), spätestens hier, für eine Zweipunkt- Landung auf dem Hauptfahrwerk, Gas raus und sanft durchziehen. Genau so wie eine „grosse“ Archer.
Eine Eigenart hat die kleine ARCHER aber. Beim Kurvenflug, gibt es einen Neigungswinkel, ab dem das Modell immer stärker „in die Kurve fällt“. Wenn man das aber weiss, hat man nichts zu befürchten. Wenn sie allzu langsam geflogen wird, dann kommt es zu einem Strömungsabriss und sie kippt weg. Das geschieht aber erst bei wirklich langsamen Fliegen. Das Abfangen kostet einen dabei nur wenige Höhenmeter. Es macht einfach Spass, damit zu fliegen. Die Flugleistungen können, was das Steigvermögen angeht, mit „Speed- 480 (400)- Modellen“ verglichen werden. Dabei meine ich vor allem den Steigwinkel, die Steiggeschwindigkeit ist natürlich geringer, da auch die Fluggeschwindigkeit niedriger ist. Es ist natürlich immer schwierig, jemand zu beschreiben, wie „gut“ das jeweilige Modell fliegt. Ich versuche es hier mit dem Vergleich mir bekannter Modelle, die ziemlich weit verbreitet sein dürften; der mögliche Steigwinkel lässt sich vergleichen mit der Partenavia von Conzelman oder der Twin Star von Multiplex. Inzwischen fliegt die PIPER ARCHER aber mit dem gleichen Motorsteller wie die CESSNA und mit einem „Pico 4/5“ Empfänger von Multiplex. Damit hat sich das Gewicht etwas erhöht, dafür kann ich aber auch den Akku ausfliegen. Aus einem unerklärlichen Grund ist es mir bisher noch nie geglückt den „grossen“ NiMh Akku von 700 mAh mit dem kombinierten Empfänger/Steller von Simprop ganz zu nutzten. Aus einem bisher unbekannten Grund stelle der Regler schon nach knapp 3 bis 4 Minuten den Motor ab, obwohl der Akku erst zu etwa 2/3 genutzt war. Auch eine Kontrolle in der Servicestelle hat keinen Fehler zu Tage gefördert. Das zu frühe Abschalten stellt sich auch mit einem anderen Akku ein. Deshalb hat sich die Ausrüstung etwas geändert, schliesslich will man den Akku ganz ausfliegen, das heisst bis zu 12 Minuten herumturnen! Noch etwas zum Schwerpunkt; mit 46 mm, von der Nasenleiste aus gemessen ist man auf der sicheren Seite. Auch mit voll gezogener Höhe ist es mehr ein „fliegerisches Ausbrechen“ als ein Abschmieren des Modells. Die Fahrt muss schon sehr niedrig sein bis es zum abkippen über eine Fläche kommt. Das anschliessende Abfangen gelingt ohne grossen Höhenverlust. Natürlich kann der Schwerpunkt auch etwas weiter zurückgenommen werden. Ich habe aber festgestellt das insbesondere bei etwas stärkerem Wind die ARCHER deutlich unruhiger „in der Luft liegt“ und da es doch recht selten wirklich Windstill ist habe in den Schwerpunkt auf der vorderen Position belassen. |
||||
ZusammenfassendBeide Modelle sind gelungene Konstruktionen, die beweisen, dass es möglich ist, leichte Modelle zu bauen, die alle Funktionen der „grossen Modelle“ aufweisen, aber noch immer in das Segment der Slow Flyer gehören. Durch die (scheinbar) aufwendige und filigrane Bauweise, wird man immer wieder mal auf diese Modelle angesprochen. Wer eine Hartbelag- Piste zur Verfügung hat, wird manch schöne Stunde mit ihnen verbringen. Landungen im Gras, sind natürlich immer mit einem gewissen Risiko verbunden, da das Fahrwerk selbstverständlich nicht ganz so stabile sein kann wie bei einem normal grossen Modell. Es gibt genügend Tage im Jahr die ein Fliegen erlauben,
den so windempfindlich wie viele andere Slow Flyer Modelle aus geschäumten
Kunststoffen sind sie längst nicht. Es sind wirkliche Flugzeuge die eine
gewisse Geschwindigkeit haben und damit auch bei etwas Wind besser beherrscht
werden können. Die Querruder sind dabei natürlich ein wesentlicher Faktor. Für
Anfänger oder noch unerfahrene Piloten auf Querruder gesteuerten Modellen, sind
sie nicht zu empfehlen. Wenn es etwas unruhig ist in der Luft muss man mit allen
Rudern arbeiten, um nicht in eine unangenehme Fluglage zu geraten. Es sind halt
auch mit rund 400 Gramm noch richtige Leichtgewichte… |
||||
|
||||
|
|
||||
Update Herbst 2003, ein neuer AntriebNun sind schon mehr als ein Jahr verstrichen, seit dem ich diesen Artikel bei FMT eingereicht habe. Im Frühling 2003 kam eine neue Generation von „Slow Flyer“ auf den Markt. Leicht, gebaut aus Styropor, Depron oder EPP, mit neuen leistungsfähigen Antrieben, die mit den neuen Lithium/Polymer- Akkus ungeahnte Flugleistungen erreichen. Wer hätte noch vor einem, zwei Jahren gedacht, das man heute Modelle bauen kann die schon mit gut „Halbgas“ Torquen können! Da konnte ich mit dem Antriebskonzept der „PIPER ARCHER“ natürlich gar nicht mehr mithalten. Mein Freund Andy hat unter anderem auch erfolgreich ein Akro- Antrieb- Set von Simprop erprobt (AcroDrive 350+, Simprop Best. Nr.: 031 513 3). Gegen ende des Sommers habe ich die Piper Archer dann auf diesen Antrieb umgerüstet.
Der erste Flug verlief ziemlich ernüchternd, die Leistung des Modells war praktisch gleich wie zuvor. Die Ursache war aber auch gleich klar, denn die Drehzahl des Motors war viel zu gering, das heisst die acht 600 mAh „NiMh- Zellen“ konnten den Motor nicht mit der geforderten Leistung versorgen. Nur beim anstechen drehte der Motor in den Bereich, in dem er eigentlich arbeiten sollte. Der Propeller war also deutlich zu gross (dem Antriebset ist ein APC 9x6“ Slow Flyer- Propeller beigelegt). Also wurde ein kleinerer bestellt, ein APC 8x6 Slow Flyer Propeller. Damit sind jetzt die Flugleistungen deutlich gesteigert! Nach dem Abheben, kann das Modell jetzt richtig gehend „an die Latte“ gehängt werden und in einem Winkel von vielleicht 30° steigen. Der Kunstflug ist deutlich kraftvoller und auch die horizontale Geschwindigkeit hat zugenommen. Oh, sicher das „Torquen oder Hoovern“ ist auch jetzt noch längst nicht möglich, aber es ist genug Leistung vorhanden um mit 600 mAh, gespeichert in acht Zellen rund 8 Minuten „herum zu turnen“. Die Landungen sind sogar noch einfacher geworden, da der jetzt deutlich grössere Propeller, bei niedrigen Drehzahlen spürbar bremst. Der Umbau war weiter kein Problem. Das Abfluggewicht liegt jetzt bei 411g, ist also etwas höher, schliesslich ist auch der Motor etwas schwerer. Wenn ein moderner Lithium/Polymer Akku eingesetzt würde (2 oder 3 Zellen) würde sich das Gewicht um mindestens 40 – 50 Gramm reduzieren lassen, und mit 3-Zellen müsste dann sogar das „Torquen/Hovern“ möglich sein, allerdings ist das Modell nicht darauf ausgelegt um diesen Flugzustand über längere Zeit kontrollieren zu können. Auf dem Plan sind jedenfalls beide Antriebsversionen eingezeichnet. Wie heisst es so schön; nur fliegen ist schöner… Mit der „PIPER ARCHER“ aber, macht auch das präzise Landen viel Freude…
|
||||
| Letzte Aktualisierung: 02. März 2008 | |
| Copyright ©, Christian Forrer, alle Rechte vorbehalten | |